|
|
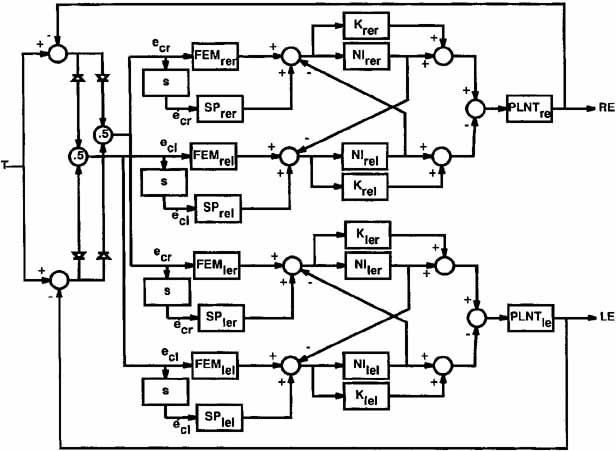
| Fig. 19 A bilateral, yoked, independent control architecture in a model of both the fast eye movement (FEM) and smooth pursuit (SP) subsystems. T, target; e, retinal error position; ē=de/dt, retinal error velocity; NI, common neural integrator; PLNT, ocular motor plant; K, proportional pathway; E, eye; RE or re, right eye; LE or le, left eye; c, conjugate; r, right; l, left; s, Laplace notation for differentiation. (modified from Dell'Osso LF: Evidence suggesting individual ocular motor control of each eye (muscle). J Vestib Res 4: 335, 1994) |