|
|
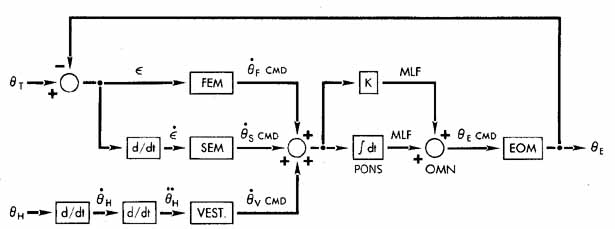
| Fig. 11 Block diagram of the dual-mode version subsystems with vestibular input illustrates the difference between the closed-loop FEM and SEM mechanisms and the open-loop vestibuloocular apparatus (VEST). The velocity commands of the FEM (dθF/dt CMD), SEM (dθS/dt CMD), and vestibular eye movements (dθV/dt CMD) are shown summing and using the final common integrator (∫ dt) in the pons. Its output and the velocity outputs travel to the oculomotor nuclei (OMN) by way of the medial longitudinal fasciculus (MLF). The eye position command (θE CMD) is sent to the extraocular muscles (EOM) to effect the required eye position (θE). θT is the target position. In this way, the position error, θ = θT - θE, and the velocity error, d☐/dt = d/dt (θT - θE) are driven to zero; there is no feedback to the vestibular system, which responds to head acceleration (d2θH/dt2). Head position (θH) and velocity (dθH/dt) are also shown along with their relationship to d2θH/dt2. CMD, command. |